松下a6伺服驱动器输出脉冲接线(松下a6伺服驱动器怎么测试)
前期准备后:如下图所示连接电线,在200智能向导上简单配置伺服运动参数,测试驱动位置。
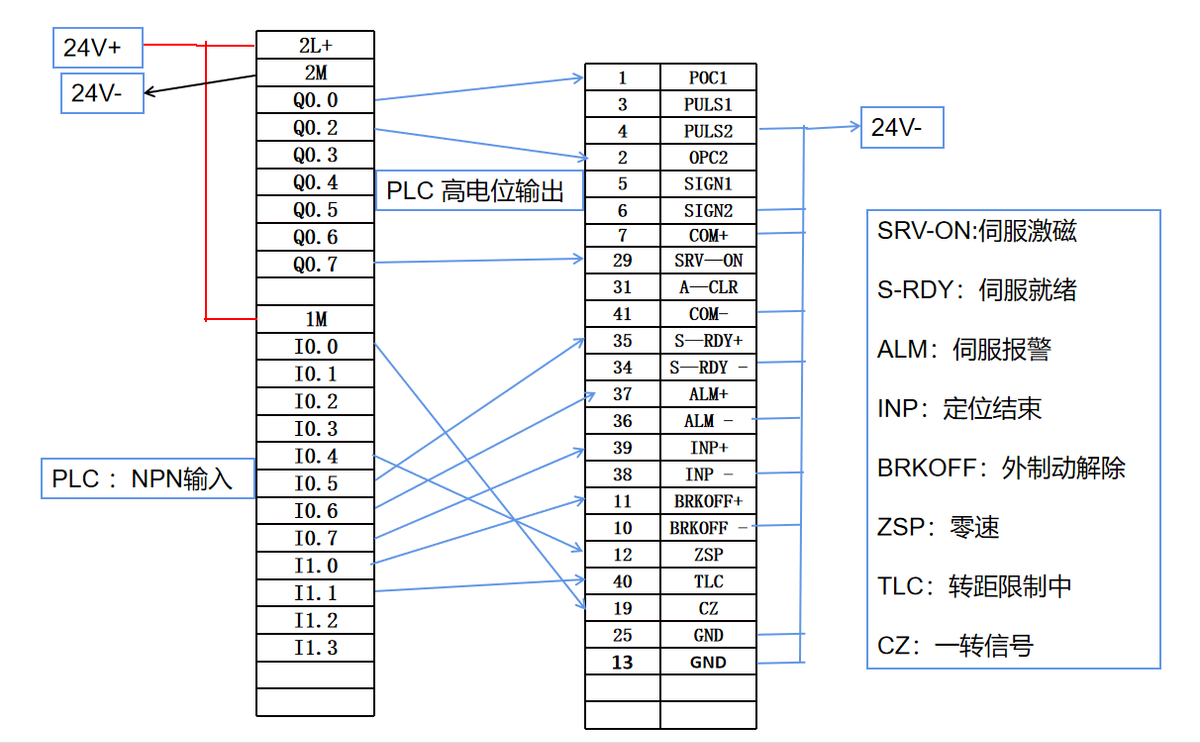
松下A6接线说明:下图是位置控制示意图
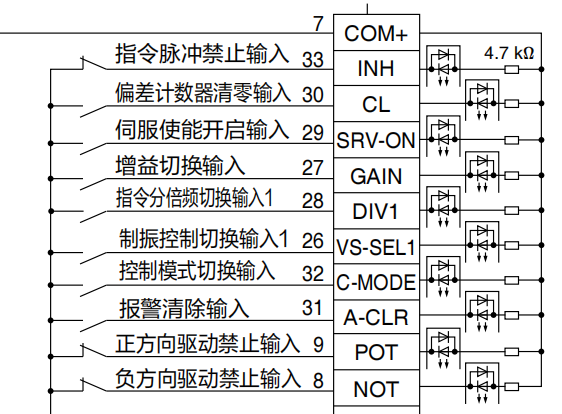
根据手册的接线图,7号端子的COM可以接24V正极或负极。由于PLC的输出是PNP输出,所以COM需要接24V负极。PLC的q端子可以给驱动器输入端给控制信号。端子3[INH]-[禁止命令脉冲输入]通常与[常闭]开关连接。由于设置参数Pr5.18被设置为[无效],因此无需连接。
同样,8号和9号的正负限位端子应与【常闭】限位开关正常连接。由于参数设置Pr5.04【无效】,可以不答。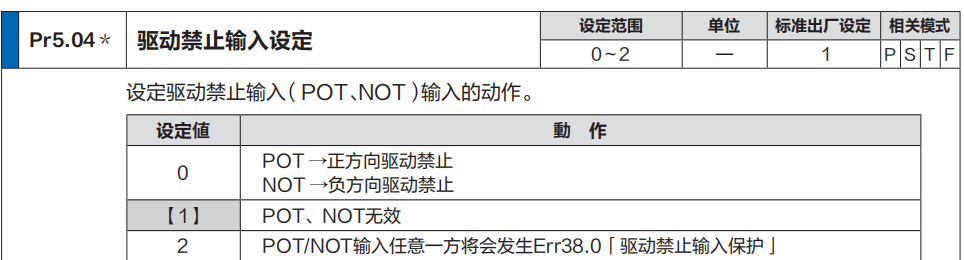
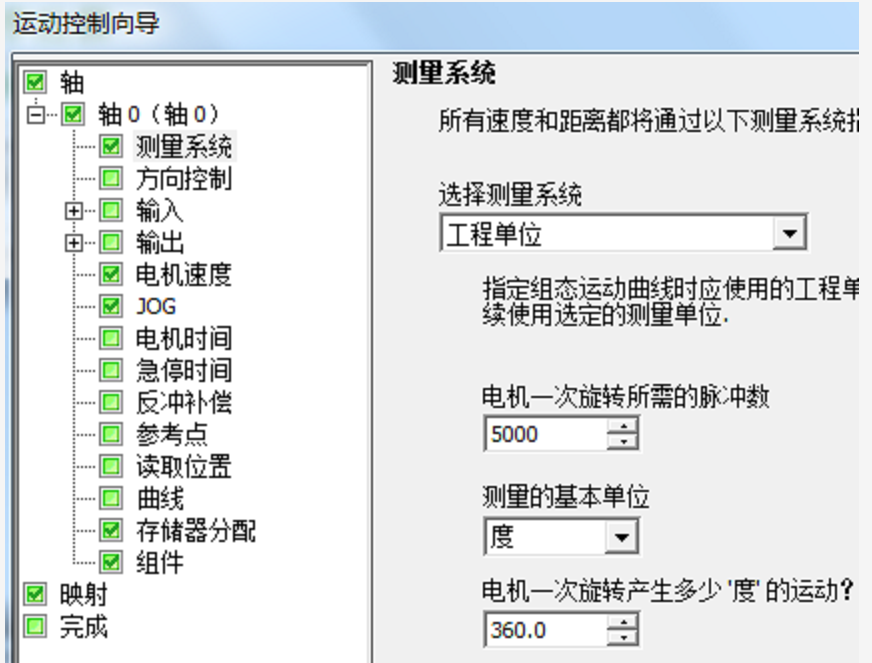
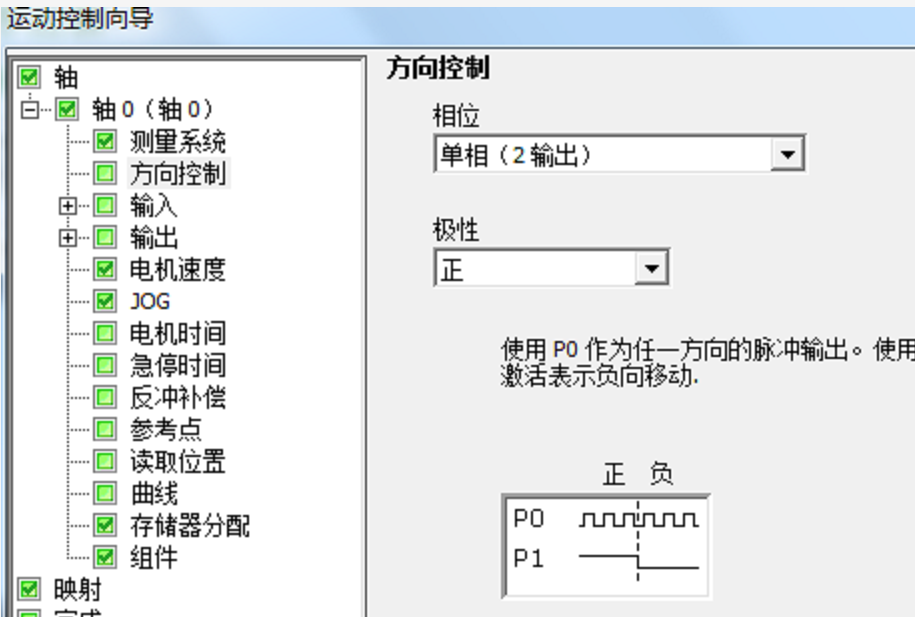
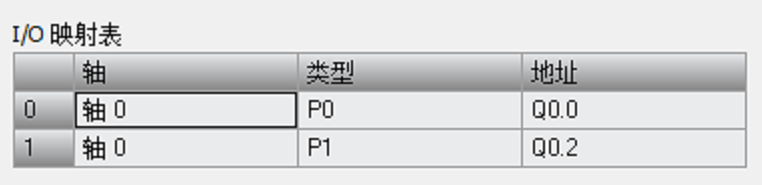
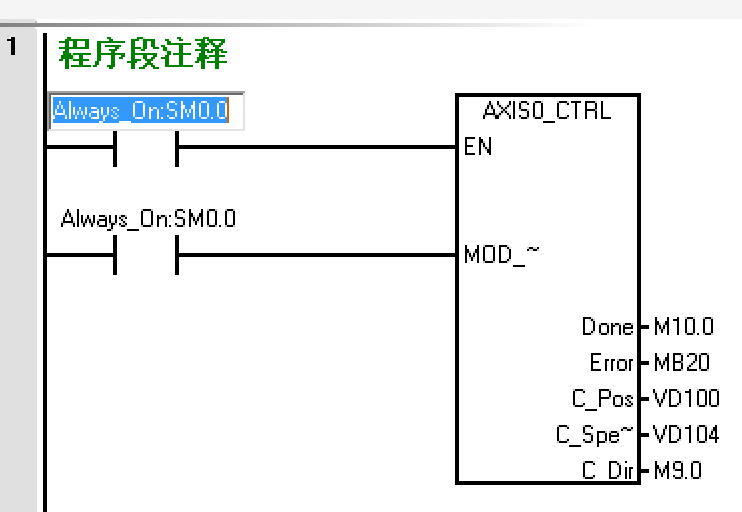
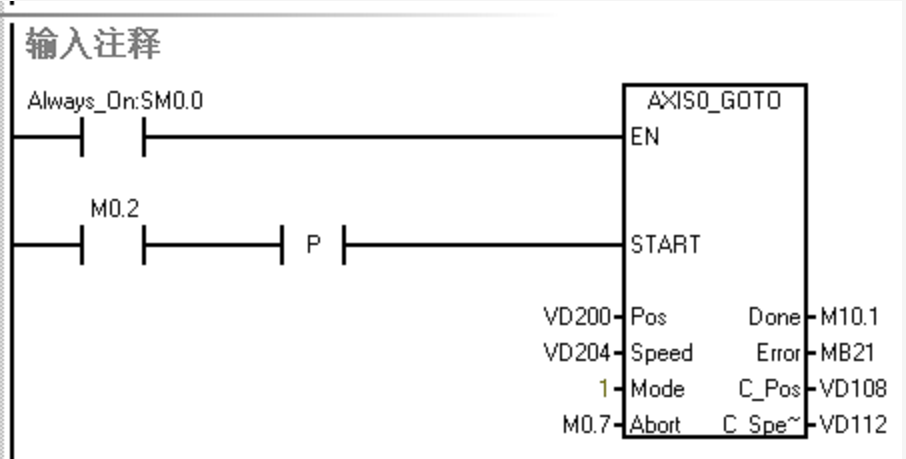
PLC运动指导如下:只进行【轴数】和测量工程单位的简单设置,其他不先设置。该程序只运行初始化和定位程序。尝试驱动控制器运行。
测试结果:
首先给驱动器【控制电源端子】L1C和L2C: 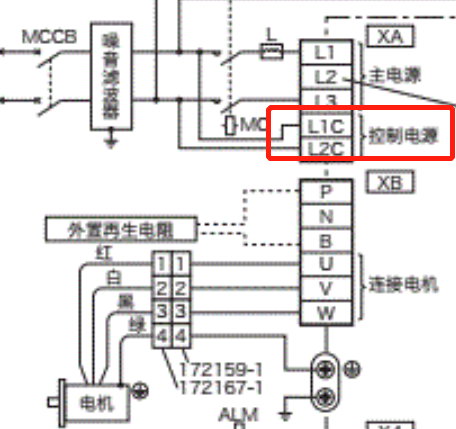 供电。
供电。
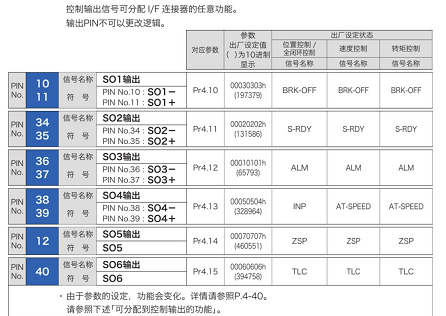
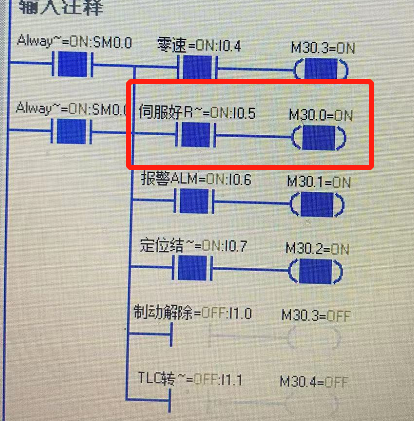
那么驱动器输出信号如下:
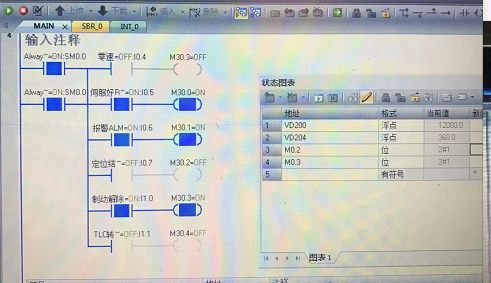
ZSP零速3354有输出
ALM警报——有输出。(无报警时驱动器有输出,有报警时无输出)
INP定位端——有输出
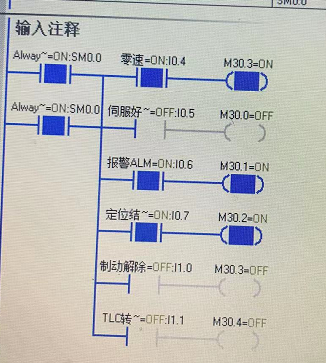
然后打开驱动器的主电源L1和L3。然后,S-RDY3354伺服系统准备输出。在PLC I0.5端。(在没有报警的情况下)。说明这个信号是在控制电源和主电路电源都通电,没有报警的时候。伺服准备好了。
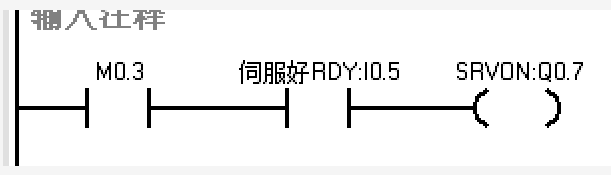
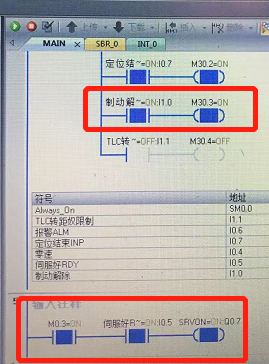
运行PLC程序,打开M0.3,那么Q0.7会有输出,接驱动器29,SRV-ON打开,伺服通电激励。你可以开动马达。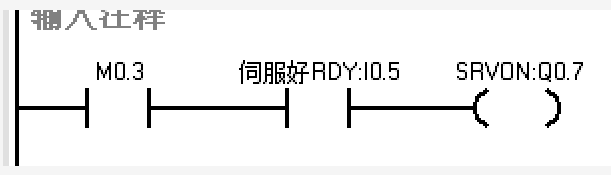
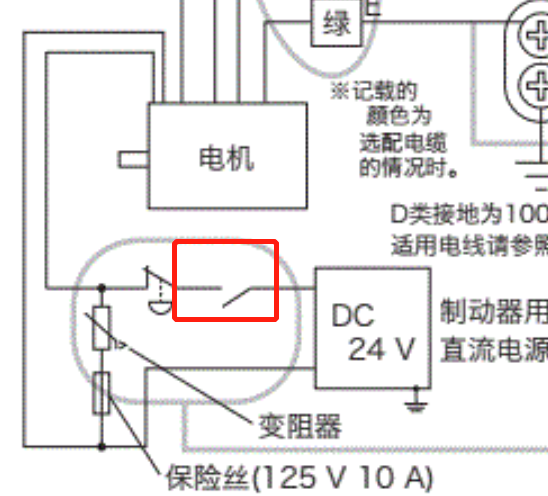
当SRV-ON打开,并且驱动器的BRKOFF信号[外部制动释放]也打开时,电机的制动被释放。
与继电器相连的BRKOFF信号。当它不导电时,电机保持制动。当有信号时,打开24V保持线圈以释放制动器。
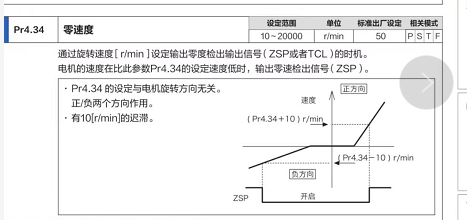
用状态图设置位置和速度,电机就会转动。当设定速度大于360度/秒时,零速检测ZSP信号关闭。当转速低于360时,ZSP会发出信号,因为最小参数设置是50转/分。存在10转的误差,即360度/秒,
在定位过程中,定位完成信号INP也被关闭,当定位完成时,它被打开。
当驾驶员报警时,ALM关闭,S-RDY关闭。BRKOFF也关闭,并施加制动。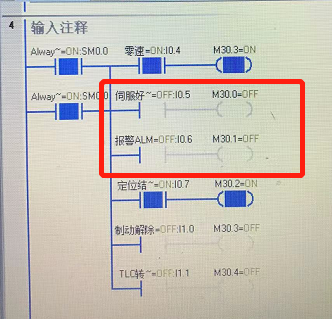
TLC转矩限制中没有使用,所以没有信号。以上六个输出信号是位置控制模式下的出厂设置功能,输出的功能也可以通过参数改变。